Du bist hier:Startseite1/News2/Standardisierte Roboterprogrammierung
ROBOTIK NEWS
Standardisierte Roboterprogrammierung
Vom schlanken Einstieg bis hin zu komplexen Anwendungen
Roboter können heute mehr, als man gemeinhin denkt. Man muss es ihnen nur „beibringen.“ Aber genau dieses Beibringen – also die Roboterprogrammierung – ist der Grund, warum viele Unternehmen vor dem Einsatz von Robotern zurückschrecken. Kleine und mittelständische Unternehmen scheuen den großen Programmieraufwand, große ärgert immer wieder die fehlende Standardisierung. Mit Lösungen, die eine intuitive und einheitliche Programmierung von Robotern unterschiedlichster Hersteller durch vordefinierte Anwendungspakete ermöglichen, sinken Aufwand und Kosten erheblich. So wird ihr Einsatz für immer mehr Unternehmen attraktiv.
Programmiersprachen von Robotern sind nicht nur komplex, sondern auch für jedes Roboter-Modell individuell, sie werden in umfangreichen Schulungen erlernt. Das hat Folgen: Kleine Unternehmen legen sich oft auf einen Hersteller fest und wechseln nicht so leicht. Bei großen Unternehmen gibt es Expertenteams, die jeweils aber immer nur den Roboter eines bestimmten Herstellers einrichten und bedienen können. Oder Unternehmen lagern die Programmierung von Robotern direkt an externe Unternehmen aus. Nachträgliche Änderungen am Quellcode – und seien sie noch so klein – sind dann nicht ohne fremde Hilfe möglich. Die Hauptkosten entstehen also weniger bei der Anschaffung der Hardware als vielmehr beim Erstellen der Software und bei späteren Anpassungen und der Wartung. Das ist gerade dann problematisch, wenn der Roboter – in seinem eigentlich idealen Einsatzbereich – als flexibles Automatisierungsgerät genutzt, also immer wieder an individuelle Aufgabenstellungen angepasst werden soll. Unternehmen, die regelmäßig neue Produkte in kleineren Stückzahlen auf den Markt bringen, könnten von den flexiblen Automatisierungshelfern immens profitieren, gäbe es nicht die Hürde der aufwändigen Programmierung.
Bei ArtiMinds Robotics haben wir zu diesem Zwecke die Robot Programming Suite (RPS) entwickelt. Mit der Software lassen sich intuitiv Roboter aller namhafter Hersteller programmieren und auch sämtliche damit kompatible Peripheriehardware wie elektrische oder pneumatische Greifer und taktile oder optische Sensoren nutzen. Programmiert wird nicht wie bisher über Zeilencode, sondern grafisch via Drag and Drop mit Hilfe von vordefinierten Anwendungsbausteinen (Bild 1 und 2). Es sind keine Programmierkenntnisse notwendig. Anwender wählen in der Software einfach die eingesetzten Hardwarekomponenten aus. Zum Programmieren der individuellen Anwendung nutzen sie dann eine Auswahl der über 60 in der Bibliothek hinterlegten Bausteine. Enthalten sind Bausteine für einfache Roboterbewegungen ebenso wie solche fürs kraftgeregelte Ausrichten, für kamerabasierte Suchbewegungen und für die SPS-Kommunikation. Damit ist die Software für diejenigen ebenso interessant, die einen schlanken Einstieg in die Robotik suchen, als auch für Unternehmen, die komplexe Aufgabenstellungen realisieren müssen. Nach der Auswahl des jeweiligen Bausteins führt ein Wizard, also eine Art digitaler Assistent, den Anwender iterativ durch die nächsten Schritte zur Anpassung an die individuellen Fertigungsgegebenheiten. So erstellte Programme lassen sich in der Software testen. Über diese Simulationen kann der Anwender direkt prüfen, ob der Roboter z.B. alle Punkte im Arbeitsbereich anfahren kann, ob Kabellängen angepasst werden müssen, es zu Kollisionen kommt und vieles mehr. Danach wird der Code kompiliert und auf die Robotersteuerung aufgespielt. Nun kann unter realen Bedingungen getestet und weiter optimiert werden. Übrigens: Eine bereits bestehende Code-Basis lässt sich in die RPS integrieren und weiterverwenden.
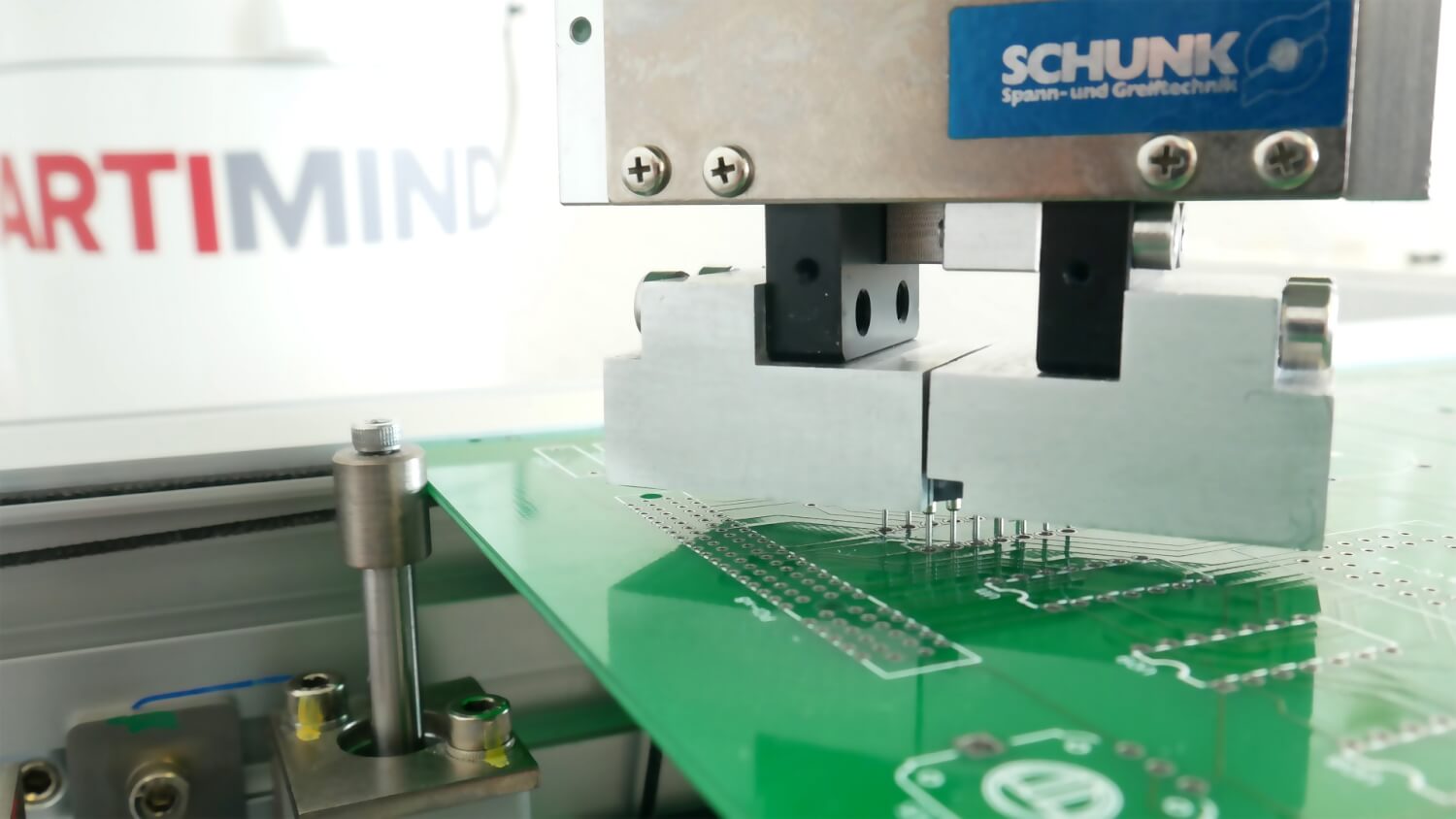
Mit der Kraft-Moment-gesteuerten Regelung erschließen sich Roboter Einsatzbereiche, die bei einer herkömmlichen Programmierung mit realistischem Aufwand nicht vorstellbar waren. Dazu gehört auch das Einstecken biegsamer Kabel z.B. bei der Steckerkonfektionierung. Ein biegsames Kabel wird vom Roboter gegriffen, von einem Kamerasystem vermessen und dann z.B. über eine Kombination aus Spike- und Spiralsuche in das Loch eingeführt und eingerastet (Bild 3). Anschließend stellt eine Zugprobe sicher, dass das Kabel korrekt sitzt. Den zeitlichen Aufwand zum Programmieren dieser Lösung per Zeilencode schätzen die Experten auf etwa hundert Mal so lang verglichen mit ihrem Programmieransatz. Neben der Elektronikfertigung finden sich Einsatzbereiche in der mechanischen Montage, z.B. beim Fügen von Teilen bei geringen Toleranzen, beim Setzen von Kunststoffclips, Dichtungen, Stopfen oder Nieten, bei Getriebe- und Motorblockmontage oder beim Positionieren und Festziehen von Schrauben. Diese Tätigkeiten werden heute gerade bei Kleinserien oftmals mit viel Handarbeit erledigt. Bei der Oberflächenbearbeitung hat ArtiMinds ebenfalls Erfahrungen gesammelt: Beim Ausschleifen und Polieren lackierter Oberflächen analysiert eine Kamera die Oberfläche von Produkten, erkennt Fehler und poliert diese Kraft-Moment-geregelt aus. Auch dafür gibt es passende Bausteine in der Bibliothek. Aber auch Schleifen und Entgraten von Kanten und Ecken, Kleben oder Farbauftrag und Materialprüfung sind realisierbare Anwendungen in diesem Industriebereich. In Qualitätskontrolle und Inspektion, Handhabung und Verpackung sowie Laboranwendungen finden sich ebenfalls zahlreiche Einsatzbereiche.
Erleben Sie unsere Software live
Vereinbaren Sie einen Termin für Ihre kostenlose und unverbindliche Online Demo!
In nur 30 Minuten zeigen wir Ihnen, wie Sie mit ArtiMinds RPS Ihre Roboterapplikationen kosteneffizient, intuitiv und einfach programmieren können.
Die unverbindliche Online Demo ist die perfekte Möglichkeit, sich einen ersten Eindruck von der Software und den Anwendungsmöglichkeiten zu verschaffen.
DAS SAGEN UNSERE KUNDEN:
„Nach den ersten Gesprächen und Präsentationen wusste ich: genau das brauchen wir! ArtiMinds ermöglicht uns eine universelle Roboterprogrammierung auf einer qualitativ höheren Ebene.“ ZF Friedrichshafen
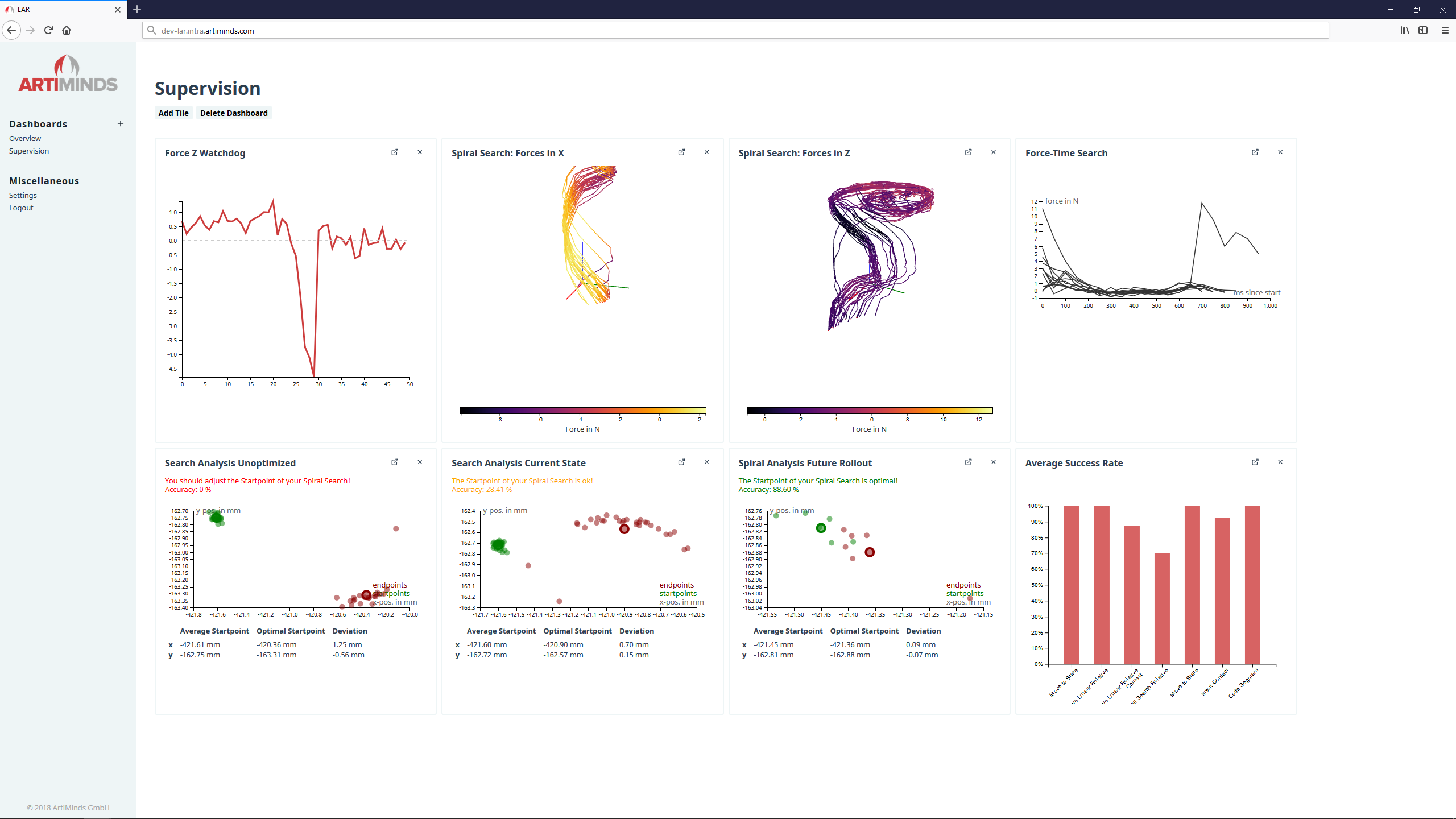
Datenanalyse und maschinelles Lernen
Auf diese Weise können schon heute ganz neue Anwendungen realisiert werden wie zum Beispiel die Durchsteckmontage (Through Hole Technology – kurz THT) bei der via Spiral- oder Spike-Suche die Einstecklöcher aufgefunden werden (siehe Anwendungsbeispiel). Nach Konfiguration und Test am realen Modell ist es oft hilfreich Prozessdaten auszuwerten, um damit den Prozess zu optimieren. Im laufenden Betrieb eines Roboters fallen jede Menge Daten an. Diese sammelt das Tool Learning and Analytics for Robots (LAR) und stellt sie Anwendern übersichtlich zur Verfügung (Bild 4). So lassen sich Werte passend zum jeweiligen Programmier-Baustein anzeigen und systematisch auswerten. Bei der THT-Montage beispielsweise kann sich der Anwender die Daten zur spiralförmigen Positionssuche anzeigen lassen. Stellt er dabei fest, dass die Startposition, an der der Roboter nach den Löchern zu suchen beginnt, nicht optimal gewählt wurde, kann er die Parameter des passenden Bausteins in der RPS entsprechend anpassen. So lassen sich Prozesse mit wenig Aufwand optimieren, sei es, um Produktionszeiten zu verkürzen, die Qualität zu verbessern oder um das gesamte Programm robuster zu gestalten.
Permanent in Entwicklung
Die angebotenen Programmierbausteine werden nach Anwenderbedarf natürlich weiterentwickelt. Dr.-Ing. Andreas Hermann (Bild 5), Team Leader Advanced Robotics ergänzt: „Neben der ständigen Erweiterung der Liste an unterstützten Peripheriegeräten arbeiten wir permanent daran, der Software neue intuitive und mächtige Funktionen hinzuzufügen, die die Programmierung noch effizienter machen und neue Einsatzgebiete erschließen.“ Hier arbeitet ArtiMinds kontinuierlich daran, neue Hardware in ihrer Robot Programming Suite nutzbar zu machen. Außerdem unterstützt das Unternehmen seine Anwender nicht nur mit Software zur Roboterprogrammierung und Analyse, sondern bietet auch Dienstleistungen an. Hermann betont: „Am Ende eines solchen Projektes ist uns immer der saubere Transfer von Technologie und Wissen wichtig. Wir stellen unseren Kunden alle Projektdateien zur Verfügung, sodass sie zukünftig möglichst viele Änderungen selbst vornehmen können. Bei anderen Dienstleistern wird oft schon für die nächste kleine Änderung wieder externe Hilfe benötigt, das ist bei uns anders.“ Besonderes Interesse haben die Robotikexperten auch an Kooperationen, in denen sie gemeinsam mit Kunden innovative Technologiefelder erschließen und weiterentwickeln können.
Bei der THT-Montage werden elektronische Bausteine mit Drahtanschlüssen (bspw. ICs) in Kontaktlöcher einer Leiterplatte gesteckt und anschließend verlötet (Bild 6). Die Anzahl der Drahtanschlüsse kann dabei variieren von einigen wenigen bis hin zu mehreren hundert Kontakten. Ein solches Bauteil robotergestützt einzustecken, ohne dabei die Drahtanschlüsse zu verletzen, ist alles andere als trivial. Sind einzelne Kontaktdrähte verbogen oder ist die Platine nicht exakt platziert, kommen herkömmliche Automatisierungssysteme an ihre Grenzen. Es gilt, die exakte Position der Löcher aufzufinden und dann das Bauteil feinfühlig einzustecken. Hierfür gibt es bei den Programmierbausteinen verschiedene Auswahloptionen. Bei der Spiralsuche beispielsweise setzt der Roboter das Bauteil auf eine definierte Position auf der Leiterplatte und „schiebt“ es dann spiralförmig vorsichtig über die Platine, bis die richtige Position gefunden wurde. Nun wird das Bauteil Kraft-Moment-geregelt eingedrückt. Bei sehr empfindlichen Drahtanschlüssen bietet sich ein alternatives Vorgehen an, bei dem das Bauteil immer wieder angehoben und vorsichtig auf der neuen Position der Platine aufgesetzt wird, so lange bis die richtige Position gefunden wurde (Spike-Suche). Realisierbar sind über die Programmierbausteine auch Lösungen, bei denen einzelne „Füße“ eines Bausteins schräg eingeführt und über Einkippen nach und nach alle Drahtanschlüsse in ihre finale Position „eingefädelt“ werden. Diese Kraft-Moment-geregelte Lösungen per Zeilencode zu programmieren ist mit sehr viel Aufwand verbunden. Mit der RPS dagegen kommen auch Laien in kürzester Zeit zu einer Lösung.
Roboteranwendungen herstellerübgreifend programmieren, simulieren, Wartungskosten senken und Fachkräftemangel lindern. Wie ZF das dank ArtiMinds gelingt erfahren Sie hier!
Sie möchten die Montage von Steckern, Kabeln, Leiterplatten oder die Bestückung von THT-Bauteilen mit Robotern automatisieren? Mit ArtiMinds RPS bringen Sie Ihrem Roboter den präzisen Umgang mit empfindlichen Bauteilen bei.




{kind=link}
{kind=link}
{kind=link}


